
高速ピッキング ロボットアプリケーション
- 参考価格
- お問い合わせください
製品・サービスに関する資料
 PDFダウンロード
PDFダウンロード
得意な分野・カテゴリー
飲料・乳製品
パン・菓子
惣菜・調理食品
製品説明・スペック紹介
高速ピッキングロボットアプリケーション
従来の生産現場では、大量に流れてくるワークを大勢の作業者がコンベアの両側に並んで処理するか、専用機で処理するためにワークを位置決めする装置が必要でした。
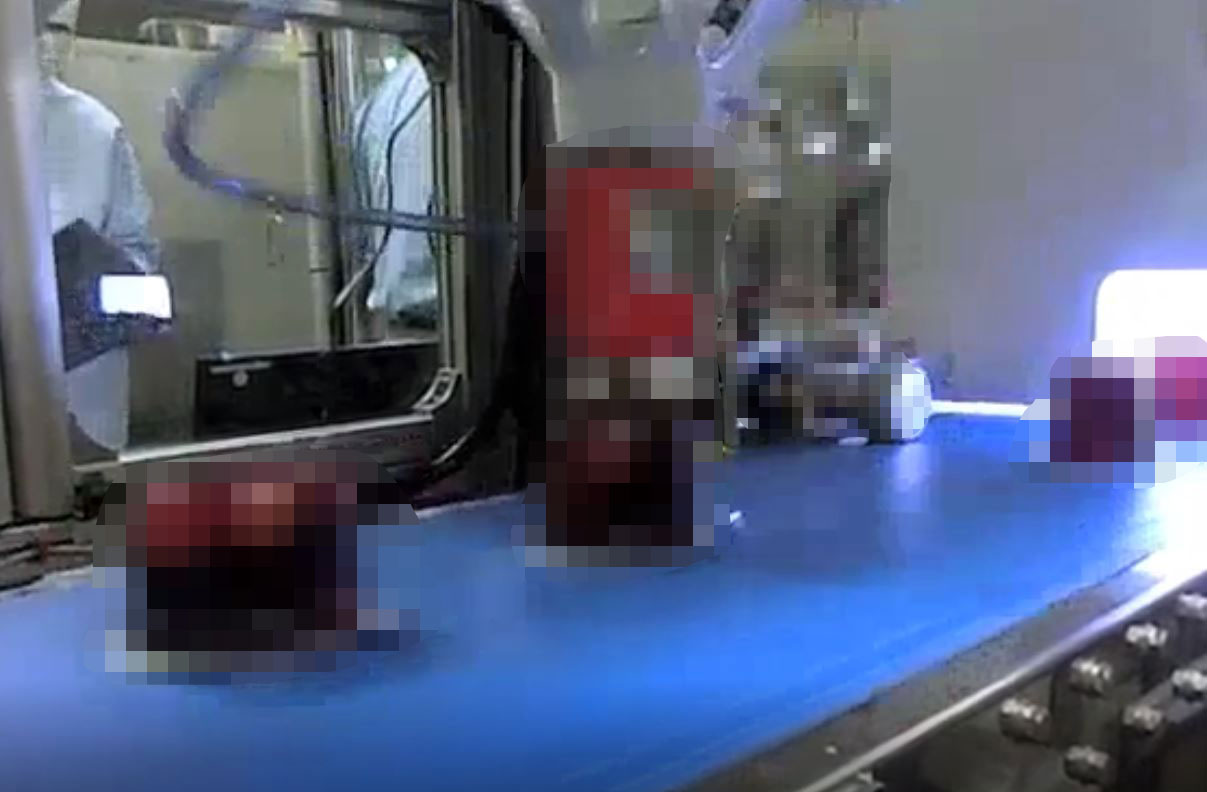
高速ピッキングロボットアプリケーションは、位置決めされていないワークを2Dビジョンカメラで認識し高速ロボットが追跡し、ピッキングします。(これをビジョントラッキングと言います。)
高速ピッキング ロボットアプリケーション
高速ピッキングロボットアプリケーションを採用されたお客様の要求事項は、次のようなものでした。
1.1分間に60個以上のワークを処理したい
2.ワークの大きさが不定形で、個体差があり、自動化が難しい
3.ワークの品種が多く、段取り替えが多い
4.ワークが壊れ易く、人手で処理するしか方法がない
5.周辺装置も含めて自動化することができるシステムインテグレータを探している
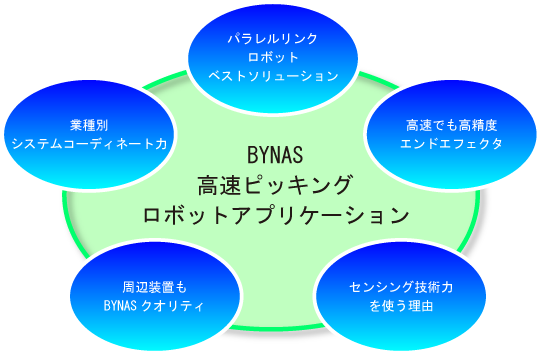
当社は、数多くの実績で培った5つの技術力で、お客様の課題にソリューションを提供します。
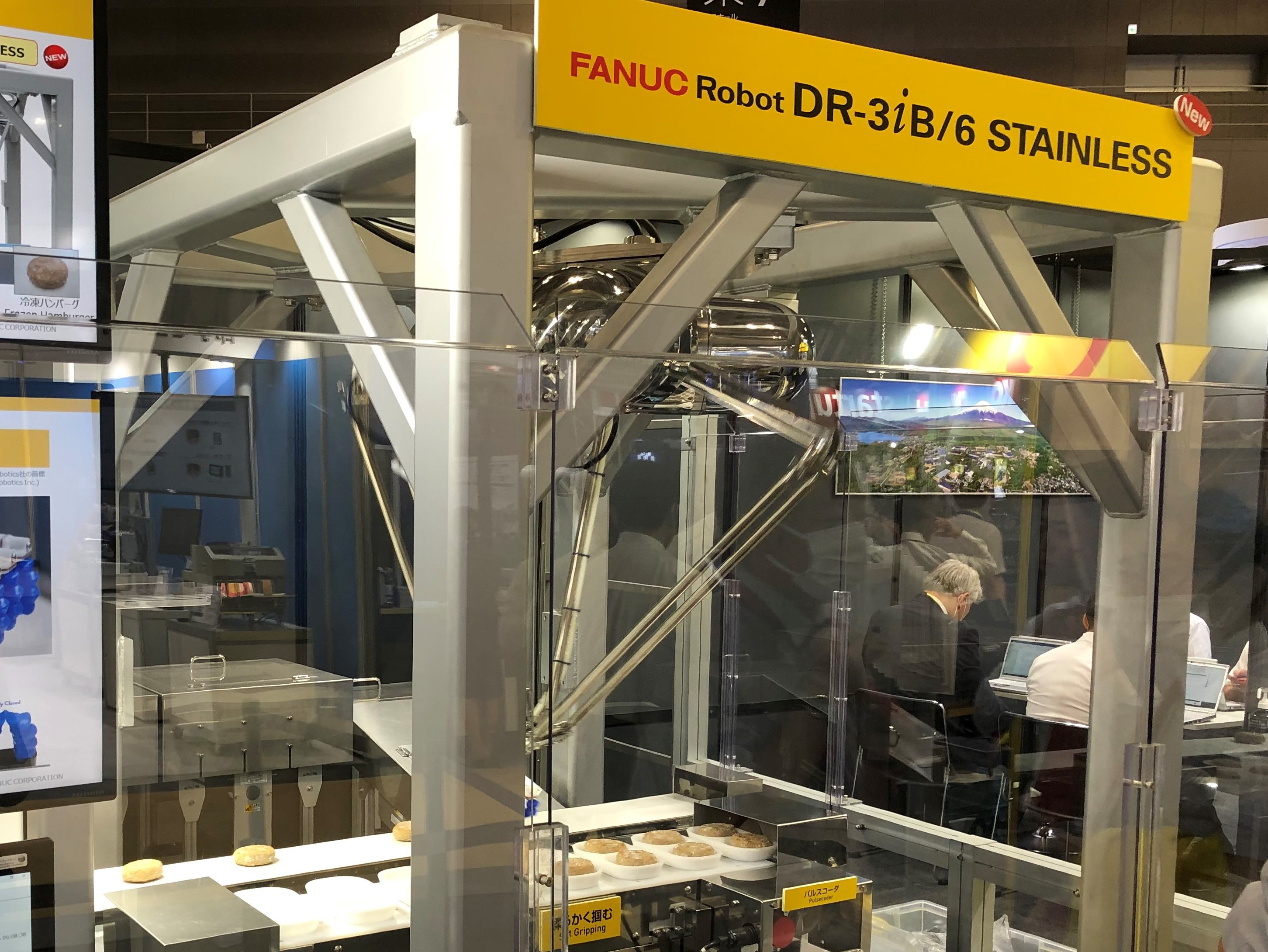
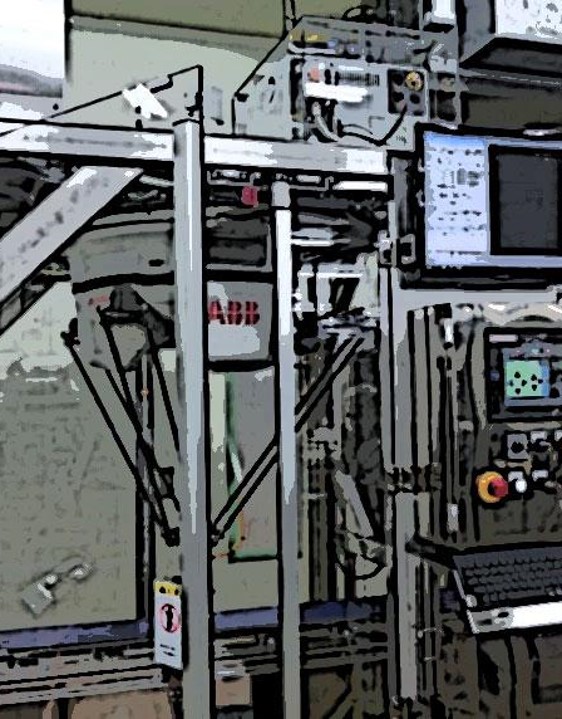
1.パラレルリンクロボット
”ロボットメーカーにとらわれないベストソリューションをご提案します“
高速で動作するパラレルリンクロボットの特性を熟知し、制御技術に長じています。
お客様の環境、工程、仕様に応じて、最適なロボットを選定します。
2.高速でも高精度 エンドエフェクタ
1分間に60個以上のワークをピッキングし、正確に置くことができるエンドエフェクタを設計、製作することができます。
とくに傷がつき易いワークや、壊れ易いワークをピッキングするエンドエフェクタの実績も豊富に持っています。
3.センシング技術力を使う理由
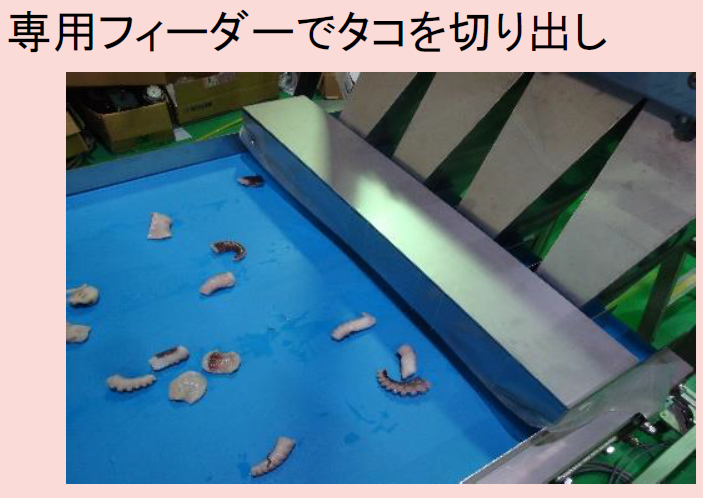
大量のワークがコンベア上を不均一の向きで流れてきますので、 2Dビジョンセンサで、ワークの輪郭を認識し、中心を狙って、ピッキングします。
当社は、個体差のあるワーク(特に一次食品、樹脂部品)を2Dビジョンセンサで認識し、高速ピッキングした実績が多数ございます。
不定形なワークにラベルを貼るピッキングラベラー ロボットアプリケーションは、高度なセンシング技術を基に確立したアプリケーションです。
従来のラベラーではラベルを貼り付けることができなかった不定形かつ柔らかいワークに対して、向きと中心を合わせてラベルを貼ることが可能です。
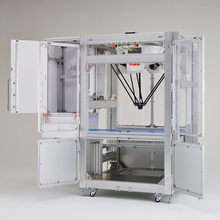
4.周辺装置もBYNASクオリティ
高速ピッキングロボットアプリケーションを実現するための周辺装置もBYNASクオリティを結集した自社設計の装置です。
前後工程も含めたシステム全体をご提供いたします。
5.業種別システムコーディネート力
高速ピッキングロボットアプリケーションを納入した業種は、自動車、電気・電子、食品、薬品と多岐に渡っています。
それぞれの業種における安全基準や設備基準に対応可能です。
電気・電子のクリーンルーム対応、食品の水洗い対応、製薬のバリデーションにも対応しています。
取り扱い企業
- 企業名
- 株式会社バイナス同企業の情報・その他製品を見る
- 所在地
- 〒490-1312 愛知県稲沢市平和町下三宅917番地2
- 電話
- 0567-69-6982
- FAX
- 0567-69-6985
- Webサイト
- サービス提供エリア
-
- 北海道・東北
- 北海道、青森県、岩手県、宮城県、秋田県、山形県、福島県
- 関東
- 東京都、神奈川県、埼玉県、千葉県、茨城県、群馬県、栃木県
- 東海
- 愛知県、静岡県、岐阜県、三重県
- 北陸・甲信越
- 山梨県、新潟県、富山県、石川県、福井県、長野県
- 関西
- 大阪府、京都府、兵庫県、滋賀県、奈良県、和歌山県
- 中国・四国
- 鳥取県、島根県、岡山県、広島県、山口県、徳島県、香川県、愛媛県、高知県
- 九州・沖縄
- 福岡県、佐賀県、長崎県、熊本県、大分県、宮崎県、鹿児島県、沖縄県
製品詳細確認・カタログ無料ダウンロード可能


関連キーワード:
パラレル リンク 型 ロボット 自動 整列 パラレル ロボット パラレル リンク ロボット パラレル リンク

